Chương trình tính toán mô phỏng tình huống trên không phục vụ công tác huấn luyện trắc thủ tổ hợp tên lửa phòng không S-75
Lê Ngọc Bảo*, Trần Ngọc Minh
Tóm tắt: Bài báo trình bày thuật toán đánh giá trắc thủ thuộc chương trình tính toán trong thiết bị huấn luyện trắc thủ bộ đội tên lửa S-75 thuộc Quân chủng Phòng không - Không quân. Việc kiểm tra đánh giá kết quả huấn luyện là một trong những nội dung hết sức quan trọng mà thiết bị cần phải đáp ứng, vì qua đó sẽ đánh giá được trình độ, khả năng hoàn thành nhiệm vụ của cán bộ, chiến sỹ, đánh giá được những nội dung đã thực hiện tốt và những mặt còn tồn tại, từ đó rút kinh nghiệm, đưa ra biện pháp khắc phục để hiệu quả, chất lượng huấn luyện được nâng cao, đảm bảo cho đơn vị luôn sẵn sàng chiến đấu trong mọi tình huống. Thuật toán đánh giá dựa trên cở sở ứng dụng hàm Lyapunov, lý thuyết độ tin cậy của hệ thống động, thuật toán toàn phương trung bình có bù sai số động sẽ được đề cập chi tiết trong bài viết này.
1. Mở đầu
Thiết bị luyện tập S-75 (TBLTS-75) là một hệ thống cung cấp tình huống trên không cho các đơn vị tên lửa S-75 do Viện Khoa học - Công nghệ Quân sự nghiên cứu theo đơn đặt hàng của sư đoàn 367 phòng không (hình 1.1) có thể thay thế hoàn toàn xe ACCORD. Khối giao tiếp và điều khiển là một chương trình tự động ghi nhận tham số của mục tiêu do hệ thống cung cấp và thao tác điều khiển của trắc thủ theo thời gian thực; trên cơ sở đó, đánh giá từng phần hoặc tổng thể quá trình huấn luyện một cách tự động, khách quan và hỗ trợ cải tiến phương pháp huấn luyện.
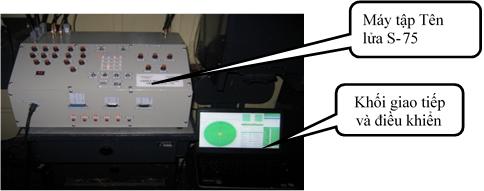
Hình 1.1. Thiết bị luyện tập S-75 TBLTS-75
Để đạt được tính chính xác trong chấm điểm tự động, trước hết nhiễu tín hiệu cần phải được giảm tới mức đủ nhỏ, sai số hệ thống cần được bù liên tục theo thời gian thực và sau cùng, thời gian đáp ứng phải đủ nhanh. Bài báo này trình bày giải thuật xử lý dữ liệu có bù sai số hệ thống thời gian thực giải quyết các vấn đề trên.
2. Các thuật toán đánh giá công tác huấn luyện
Thuật toán đánh giá công tác huấn luyện được xây dựng cho hệ thống tự động chấm điểm kíp trắc thủ, đảm bảo các yêu cầu của chương trình huấn luyện do Cục quân huấn và Bộ tham mưu ban hành.
2.1. Hệ thống đánh giá của TBLTS-75Công tác huấn luyện trắc thủ tên lửa S-75 là một quá trình phức tạp bao gồm nhiều người, nhiều thao tác và chịu nhiều tác động khách quan của môi trường cũng như tình trạng kỹ thuật của hệ thống.
Để đánh giá công tác huấn luyện tự động, chính xác, cần có số liệu cung cấp từ hệ thống tạo mục tiêu và hệ thống điều khiển hỏa lực theo thời gian thực, đồng thời phải sử dụng các thuật toán phù hợp để phân tích các yếu tố ảnh hưởng đến chất lượng đánh giá.
Có 2 thuật toán được nghiên cứu là: Thuật toán đánh giá sự ổn định được xây dựng dựa trên định lý Hartman - Grobman (tuyến tính hóa); thuật toán sai số toàn phương có bù sai lệch động.
Thuật toán đánh giá độ ổn định của hệ thống theo phương pháp tuyến tính hóa Hartman - Grobman được trình bày trong [2],[9] và [11]. Thuật toán Hartman - Grobman ứng dụng trong hệ thống không đạt được kết quả hội tụ trong thời gian đủ ngắn. Thuật toán đánh giá sai số toàn phương trung bình có bù sai số hệ thống động sử dụng trong TBLTS-75 được phát triển bởi nhóm nghiên cứu đề tài, phát triển từ thuật toán sai số toàn phương trung bình giải bằng hàm Lyapunov, ứng dụng trong lý thuyết độ tin cậy và hệ thống động.
Hệ thống đánh giá có nhiệm vụ giám sát, kiểm tra, theo dõi và đánh giá chất lượng trắc thủ nhằm rút kinh nghiệm, nâng cao hiệu quả công tác huấn luyện (hình 2.1).
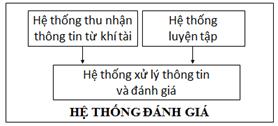
Hình 2.1: Mô hình hệ thống đánh giá
Hệ thống đánh giá ghi nhận dữ liệu thời gian thực từ Hệ thống thu nhận thông tin (điều khiển hỏa lực của khí tài) và từ Hệ thống luyện tập đưa vào để so sánh, tính toán đưa ra sai số trong quá trình thao tác sục sạo, bám sát và tiêu diệt mục tiêu, từ đó đánh giá được chất lượng, khả năng chiến đấu của trắc thủ.
2.2. Độ trễ và các loại sai số của hệ thống
Mục tiêu của hệ thống luyện tập là cấp tín hiệu thời gian thực phục vụ công tác huấn luyện sao cho sát thực tế. Tuy nhiên trong quá trình hoạt động tương tác đồng bộ giữa hệ thống thiết bị luyện tập (TBLT) với khí tài và kíp trắc thủ, hệ thống TBLT phải trải qua thời gian thu thập xử lý thông tin từ đó mới quyết định đưa ra phương án tạo tình huống phù hợp, các tính toán và truyền dữ liệu trong hệ thống tạo ra độ trễ không ổn định. Do đó cần xử lý sao cho độ trễ không làm ảnh hưởng tời kết quả đánh giá. Phương pháp tính sai số và độ trễ dựa trên khối lượng công việc mà hệ thống TBLT phải xử lý cũng như qua phân tích các yêu cầu đặt ra đối với TBLT về việc đảm bảo công tác huấn luyện sát thực tế, về đặc tính tham số kỹ thuật của khí tài.
2.2.1. Khối lượng công việc hệ thống TBLT cần xử lý
Khối lượng công việc cần xử lý phụ thuộc vào số lượng bài tập phải tạo ra, thời gian yêu cầu đối với các bài tập đó, thời gian để xử lý các tinh toán vị trí từng mục tiêu, tốc độ đọc và xuất dữ liệu tại các cổng vào/ra của máy tính, dung lượng thông tin (bao gồm số liệu cần lưu trữ, các thuật toán xử lý số liệu, tổ chức truyền số liệu và sự trao đổi số liệu với các thành phần khác).
Độ trễ do TBLT thực hiện khối lượng công việc còn phụ thuộc vào tần số làm việc của các bo mạch. Dt là khoảng thời gian được tính dựa trên vận tốc trung bình của mục tiêu Vm và độ chính xác trong bám sát cự ly Dr cần phải có. Đối với khí tài ZSU vận tốc tối đa của mục tiêu mà khí tài có thể tiêu diệt là Vm = 400m/s, độ chính xác bám sát cự ly tối thiểu là Dr = 20 mét, lúc đó Dt được tính theo (1):

Như vậy, việc lựa chọn tham số bo mạch phần cứng của TBLT sẽ căn cứ vào giá trị này của Dt, lúc đó thiết bị hoàn toàn đáp ứng được tính thời gian thực của các xung được tạo ra. Đây không phải là bài toán khó của các mạch số hiện đại với thời gian xử lý một lệnh khoảng 8ns, nhưng khi kết hợp với các mạch điện tử của tên lửa S-75 sử dụng công nghệ tương tự thì thời gian trễ sau khi đồng bộ có thể lên đến 65ms (mục 2.2.2) khiến màn hình bị giật lắc liên tục.
2.2.2. Đặc tính tham số kỹ thuật của khí tài
Trong hệ thống khí tài tên lửa S-75 nói riêng, đơn vị đo lường về góc thường được sử dụng là ly giác.
a) Phân tích độ chính xác qua tham số khung bám sát góc 150:
Khung bám sát (KBS) được mô tả trên hình 2.2.
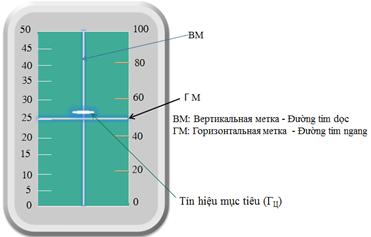
Hình 2.2: Khung bám sát mục tiêu của trắc thủ
KBS được dùng để theo dõi và xác định tham số góc tà ε của mục tiêu ở chế độ bám sát. Màn hình trắc thủ có độ rộng về góc tương đương 150. Độ rộng này theo kết quả khảo sát tương đương 100 đường quét dòng. Vậy mỗi đường quét tương đương 0,150, do đó sai số tối đa khi xác định tọa độ góc mục tiêu trên màn hình KBS là 0,150. Từ đây TBLT cần đảm bảo sao cho tín hiệu mục tiêu do nó tạo ra có sai số không vượt quá 0,150. Yêu cầu đó sẽ được đáp ứng qua việc phân tích độ rộng bus dữ liệu mà TBLT sử dụng. Nếu dùng dữ liệu số 8 bit (1 byte = 256 mức) để biểu diễn giá trị góc trong vùng KBS thì mỗi mức lượng tử tương đương 150/256 = 0,0590~ 0,98 ly giác. Xung đồng bộ góc tà có thời gian đồng bộ đo thực tế là 47ms (tương ứng 150).
b) Phân tích độ chính xác qua tham số màn hình ra đa:
Khi ra đa làm việc ở chế độ sục sạo, tham số góc mục tiêu được xác định trên màn hình đài rađa P18 (hình 2.3).
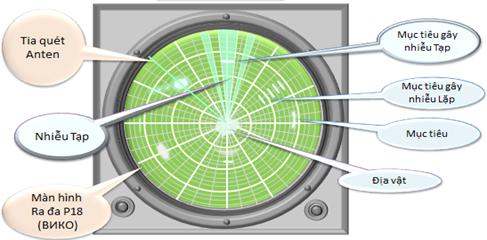
Hình 2.3: Màn hình quan sát góc mục tiêu P18
Độ chính xác cần thiết để xác định góc anten εa, βa ở chế độ này đòi hỏi sai số không vượt quá 6 ly giác, tức khoảng 0,360 (xem bảng 1).
Bảng 1: Giới hạn sai số cho phép
|
Tham số
|
Đơn vị đo
|
Giá trị cho phép
|
|
Sai số cự ly
|
Mét
|
< ±20
|
|
Sai số vận tốc
|
m/s
|
< ±1
|
|
Sai số góc
|
Ly giác
|
< ±6
|
Nếu dùng dữ liệu số đủ 10 bit (tương đương 1024 mức) để biểu diễn thì mỗi mức lượng tử tương đương 6000 ly giác/1024bit = 5 ly giác/bit (0,30), nhỏ hơn độ chính xác cần có. Như vậy, TBLT sử dụng dữ liệu 10 bit sẽ đảm bảo độ chính xác yêu cầu trong chế độ bám sát. Thời gian trễ do tính toán và truyền số liệu thay đổi trong khoảng 130us - 12,5 ms tương ứng với 1 - 100 mục tiêu.
c) Phân tích độ chính xác qua tham số màn hình cự ly ở chế độ sục sạo: Sai số xác định cự ly yêu cầu của khí tài ZSU phải nhỏ hơn 20 mét (xem bảng 1).
Do đó, với chế độ 20 km, số mức lượng tử tối thiểu N cần có là: N = 20.000 m/20m = 1000 (mức).
Sử dụng 2 bytes (tương đương 65.536 mức) cho dữ liệu cự ly, lúc đó mỗi mức lượng tử tương đương: 20.000m/65.536 mức = 0,305m/mức
(thỏa mãn yêu cầu nhỏ hơn 20 m). Thời gian trễ dao động trong khoảng 170us - 5ms
d) Phân tích độ chính xác qua tham số màn hình cự ly ở chế độ sục bám sát:
Ở chế độ bám sát yêu cầu về độ chính xác theo cự ly là rất quan trọng. Trong quá trình mục tiêu chuyển động theo cự ly sẽ có một vấn đề là “độ mịn” của chuyển động mục tiêu. Nếu mức lượng tử không đủ lớn thì mục tiêu sẽ bị giật về cự ly.
Như vậy, việc thiết lập mô hình hệ thống qua các phân tích trên hoàn toàn đảm bảo được yêu cầu đặt ra đối với TBLT về độ chính xác trong công tác huấn luyện (xem bảng tiêu chí đánh giá trắc thủ).
e) Phân tích độ chính xác qua các loại sai số của hệ thống:
Sai số hệ thống (SSHT): Xác định bằng trung bình:
Trong đó: i: Thứ tự lần đo; Ki: Số liệu sai số lần đo thứ i với mọi dấu (cộng và trừ); n: Tổng số lấn đo.
Sai số bình phương trung bình (SSBPTT): Là đặc tuyến tản mát hoặc phân tán của sai số đo ngẫu nhiên xung quanh sai số hệ thống m

Trong đó:
i: Thứ tự lần lấy dữ liệu;
Ki: Số liệu đo lần thứ i;
n: Tổng số lấn lấy dữ liệu từ hệ thống ZSU ;
m: SSHT.
Sai số tổng hợp S:

Sai số điểm gặp Δε(p), Δβ(p) - là sai số bám sát trong mặt phẳng tà (ε) và phương vị (β) tại thời điểm có lệnh bắn (xem [2] trang 11-12):
Δε(p) = K(ε)*Kg
Δβ(p) = K(β)*Kg (5)
Với Kg: Hệ số chuyển đổi góc: đổi đơn vị đo từ “Vôn” sang “Phút”; Kg = 2 phút/V
Bảng 2 Tiêu chí đánh giá chất lượng huấn luyện kíp trắc thủ được công bố trong sổ tay sỹ quan phòng không ([7] trang 5-6). Thuật toán đánh giá trắc thủ dựa trên các tham số đo được và bảng này để cho điểm đánh giá trắc thủ.
Bảng 2: Tiêu chí đánh giá chất lượng huấn luyện kíp trắc thủ
|
Loại mục tiêu bám sát
|
Điểm (loại)
|
|
5 (Giỏi)
|
4 (Khá)
|
3 (Đạt)
|
2 (Không đạt)
|
|
Góc
(Ly giác)
|
Cự ly
(mét)
|
Góc
(Ly giác)
|
Cự ly
(mét)
|
Góc
(Ly giác)
|
Cự ly
(mét)
|
Góc
(Ly giác)
|
Cự ly
(mét)
|
|
Bay bằng
|
≤6.0
|
≤20
|
≤7.0
|
≤22
|
≤8.0
|
≤24
|
≥8.0
|
≥24
|
|
Cơ động
|
≤7.0
|
≤22
|
≤8.0
|
≤24
|
≤9.2
|
≤26
|
≥9.2
|
≥26
|
|
Có nhiễu
|
≤7.5
|
≤24
|
≤9.2
|
≤26
|
≤11.0
|
≤28
|
≥11.0
|
≥28
|
2.3 Thuật toán toàn phương có bù sai số động
Phương pháp sai số toàn phương có bù sai số động là thuật toán được xây dựng dựa trên phương pháp giải bằng hàm Lyapunov có bù sai số động bằng hệ tự động cập nhật và bù sai số động.
2.3.1 Thuật toán toàn phương giải bằng hàm Lyapunov
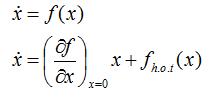
Phương pháp sai số toàn phương trung bình là phép ước lượng là trung bình của bình phương các sai số. MSE là một hàm rủi ro, tương ứng với giá trị kỳ vọng có thể tính được bằng giải hàm Lyapunov. Điểm ổn định Lyapunov là một nghiệm có thể tính bằng hệ phi tuyến (xem [5], trang 32).
Ổn định Lyapunov: Điểm cân bằng hệ phi tuyến

Trong đó x, u là các vectơ tương ứng tham số hệ thống và mục tiêu theo thời gian t. Nếu x ®xc hằng số khi u = uc hằng số bất kỳ thì xc gọi là điểm cân bằng của hệ phi tuyến. Số điểm cân bằng phụ thuộc bản chất của hàm f.
Trong bài toán đánh giá trắc thủ, các tham số x, u là các giá trị của hệ thống ZSU và vector mục tiêu tương ứng theo thời gian t được cập nhật tự động và giá trị f điểm cộng dồn như sai số toàn phương trung bình.
Định nghĩa của ổn định Lyapunov cho các hệ thống thời gian rời rạc cũng gần giống như đối với các hệ thống thời gian liên tục. (xem [5] trang 118-120)
Áp dụng hàm Lyapunov tìm điểm ổn định hệ thống đảm bảo thời gian thực, tuy nhiên do nhiễu và sai số hệ thống, tính ổn định giảm theo thời gian. Để giải quyết vấn đề này, chúng tôi kết hợp phương pháp bù sai số động.
2.3.2 Thuật toán toàn phương trung bình có bù sai số động
Phương pháp bù sai số động là giải pháp được sự dụng trong các hệ tự động với sai số biến đổi theo thời gian.
Sơ đồ thuật toán như trong hình dưới
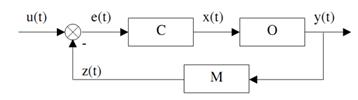
Hình 3.1 Thuật toán toàn phương trung bình có bù sai số động
Trong đó u(t) là tín hiệu đầu vào, C là khối điều khiển áp dụng hàm Lyapunov trình bày ở mục 2.3.1, O là thuật toán khử nhiễu, M là module tính sai số động. Thuật toán khử nhiễu nằm ngoài phạm vi báo cáo này. Khối M áp dụng phương trình tính sai số S(t) trình bày ở mục 2, liên tục được bù vào tín hiệu vào u(t).
2.3.3 Tham số các tín hiệu đầu vào
Tham số các tín hiệu đầu vào là các giá trị do hệ thống S-75 cấp. Các giá trị đo thực tế phù hợp với thuyết minh kỹ thuật của khí tài.
Bảng 3: Thông tin tín hiệu đầu vào hệ thống đánh giá
|
Tên tín hiệu
|
Ký hiệu
|
Giá trị
|
Ghi chú
|
|
Xung đồng bộ cự ly
|
Г0
|
<+50V
|
Cạnh lên
|
|
Xung cự ly mục tiêu
|
ГЦ
|
<+50V
|
Cạnh lên
|
|
Xung cửa sóng bám sát cự ly
|
ГCS
|
<+50V
|
Cạnh xuống
|
|
Xung đồng bộ góc KBS ε0
|
ε0
|
<+30V
|
Cạnh xuống
|
|
Lệnh tiêu diệt mục tiêu
|
Lệnh
|
+26V
|
Mức điện áp
|
IV. Kết quả thử nghiệm
Thực nghiệm được tiến hành 100 lần với 3 phương pháp: Đánh giá sử dụng phương pháp thủ công (Kíp trưởng đánh giá); Hệ thống đáng giá sử dụng phương pháp ổn định bằng hàm Lyapunov; Hệ thống đáng giá sử dụng phương pháp toàn phương trung bình có bù sai số động.


Hình 4.1 : Bám sát mục tiêu Đài điều khiển TL S-75 và Đài rađa P18
Kết quả đánh giá trong bảng dưới đây:
Bảng 4.1: Kết quả đánh giá thử nghiệm
|
Nội dung
|
Đánh giá thủ công (chuẩn)
|
Thuật toán Lyapunov
|
Thuật toán toàn phương trung bình có bù sai số động
|
|
Bám sát MT tốc độ 200m/s
|
85/100
|
91/100
|
86/100
|
|
Bám sát MT tốc độ 300m/s
|
78/100
|
67/100
|
76/100
|
|
Bám sát MT tốc độ 400m/s
|
65/100
|
56/100
|
64/100
|
|
Bám sát MT tốc độ 400m/s
|
63/100
|
52/100
|
63/100
|
Trong bảng kết quả đánh giá, thuật toán toàn phương trung bình có bù sai số động cho kết quả phù hợp với đánh giá thủ công và được đơn vị chính thức sử dụng.
5. Kết luận
Thuật toán toàn phương trung bình có bù sai số động được ứng dụng tạo được sự tin cậy và được đơn vị sử dụng thiết bị công nhận là phù hợp với điều kiện huấn luyện và đánh giá trắc thủ Thuật toán cho phép đánh giá đầy đủ toàn kíp, từng cá nhân cũng như từng thao tác của mỗi trắc thủ. Giải thuật cũng đảm bảo hệ thống tự động đánh giá trắc thủ hoạt động ổn định trong môi trường nhiễu, đảm bảo thời gian thực.
Thuật toán toàn phương trung bình có bù sai số động có thể ứng dụng vào hệ thống tạo đường bay phục vụ huấn luyện trắc thủ các tổ hợp tên lửa phòng không S-75 cũng như S-125, S-300.
Tài liệu tham khảo
[1]. Khuyết danh, Thuyết minh kỹ thuật binh khí 1РЛ33М2, Nhà xuất bản cục Kỹ thuật, quân chủng Phòng không không quân (2002). Tr. 3 – 16.
[2]. Khuyết danh, Thuyết minh kỹ thuật và hướng sử dụng thiết bị tạo đường bay . Nhà xuất bản cục Kỹ thuật, quân chủng Phòng không không quân (2002).
[3] TTKHKT &CNQS, Thuyết minh kỹ thuật và HDSD thiết bị TL-M20, 11-2001
[4]. Malisoff, Constructions of Strict Lyapunov Functions. Springer (2009). Tr 25-127.
[5]. Khuyết danh, Sổ tay sỹ quan RADAR, Nhà xuất bản cục Kỹ thuật, quân chủng Phòng không không quân (2000). Tr. 1– 8
[6]. Khuyết danh, Sổ tay tham mưu Phòng không, NXB Quân đội Nhân dân (1999). Tr.5- 25
[7] Nguyễn Việt Hải - Phạm Hoàng Thắng, Giáo trình kiểm tra và huấn luyện trắc thủ, NXB Quân đội Nhân dân (1996). Tr.1- 45
[8]. Nguyễn Việt Hải, Giáo trình xe luyện tập và kiểm tra kíp chiến đấu tên lửa phòng không – ACCORD, Nhà xuất bản cục Kỹ thuật, quân chủng Phòng không không quân (1996). Tr. 1– 22