a/ Tên nhiệm vụ: Nghiên cứu thiết kế chế tạo thiết bị tập bắn súng ứng dụng công nghệ giám sát chuyển động súng và mô hình thực tế ảo
b/ Tổ chức chủ trì nhiệm vụ: Viện Công nghệ thông tin
c/ Họ và tên chủ nhiệm nhiệm vụ: Ths. Lê Ngọc Bảo và những cá nhân tham gia chính:
1. TS. Tô Tuấn
2. Ths. Hoàng Tuấn
3. Ths. Trần Chí Thiện
4. Ths. Đỗ Kim Đạt
5. Ths. Huỳnh Huy Cường
6. KS. Đậu Trung Thông
7. KS. Huỳnh Thị Lệ Quyên
8. KS. Lê Đình Dân
9. CN. Trần Tuấn Hải
d/ Mục tiêu của nhiệm vụ: Nghiên cứu công nghệ giám sát chuyển động và ứng dụng vào giám sát chuyển động súng; ứng dụng mô hình thực tế ảo vào xây dựng trường bắn ảo; nghiên cứu thiết kế và chế tạo tổ hợp thiết bị mô phỏng tập bắn súng AK bài bắn 1 trong nhà với các tình huống gần sát với thực địa, cho phép biết được kết quả ngay khi bắn.
đ/ Kết quả thực hiện tóm tắt:
Tóm tắt:
Kết quả bắn phụ thuộc rất nhiều vào yếu lĩnh bắn. Vì vậy, nếu xác định được những mặt còn hạn chế khi thực hiện các yếu lĩnh trong quá trình bắn sẽ giúp nâng cao được kết quả bắn. Việc ứng dụng công nghệ giám sát chuyển động sẽ có nhiều hướng phát triển. Với việc ứng dụng công nghệ giám sát chuyển động cho phép tăng được tốc độ xử lý cho phép tính toán được nhanh chóng điểm ngắm (hoặc điểm đạn) trên bia theo “thời gian thực”. Điều này cho phép vẽ lại nhanh chóng quỹ đạo điểm ngắm (hoặc điểm đạn) trong quá trình bắn. Qua đó, cho phép nhận xét trực quan những mặt hạn chế về yếu lĩnh trong quá trình bắn. Từ đó, có hướng huấn luyện nâng cao chất lượng huấn luyện.
Đặt vấn đề:
Huấn luyện quân sự là một trong những nhiệm vụ hàng đầu của quân đội ta trong giai đoạn xây dựng và phát triển kinh tế nước ta hiện nay. Với tư tưởng quốc phòng toàn dân, Đảng và Nhà nước ta đã quy định giáo dục quốc phòng là một trong những yêu cầu bắt buộc. Nội dung huấn luyện bắn súng bộ binh được xác định là một trong những nội dung quan trọng trong huấn luyện quân sự và giáo dục quốc phòng. Hiện nay, thiết bị hỗ trợ tập bắn súng được trang bị rất ít, khó lòng đáp ứng đủ nhu cầu cho số lượng lớn tham gia huấn luyện quân sự quốc phòng trên địa bàn tỉnh, bao gồm cán bộ chiến sỹ trên địa bàn, đội ngũ cán bộ công chức nhà nước, học sinh, sinh viên học tập công tác trên địa bàn tỉnh Bình Dương, nên việc huấn luyện bắn súng chủ yếu là thủ công.
Kết quả bắn tốt phụ thuộc chủ yếu vào yếu lĩnh cơ bản của người bắn như thao tác ngắm bắn, kỹ năng lấy đường ngắm, kỹ năng cố định đường ngắm, thao tác bóp cò … Tuy nhiên, với các trang thiết bị phục vụ huấn luyện tập bắn súng hiện có, chưa cho phép thấy rõ những mặt hạn chế của học viên để có thể luyện tập khắc phục những nhược điểm đó. Thường kết quả bắn phụ thuộc nhiều vào nhận định chủ quan, cho nên có nhiều học viên dù học tập rèn luyện rất chăm chỉ nhưng vẫn không đạt được kết quả cao.
Trước tình hình đó, năm 2013, Sở KH&CN tỉnh Bình Dương đã cho phép thực hiện đề tài “Nghiên cứu, thết kế chế tạo thiết bị tập bắn súng ứng dụng công nghệ giám sát chuyển động và mô hình thực tế ảo” do Thượng tá - Thạc sĩ Lê Ngọc Bảo làm chủ nhiệm đề tài. Đề tài đã được nghiệm thu vào tháng 08/2014 với kết quả xếp loại Khá.
Ứng dụng công nghệ giám sát chuyển động là ứng dụng các công nghệ hiện có phục vụ cho mục đích thu thập các thông tin về chuyển động, qua đó đánh giá xử lý các thông tin thu thập được, khác với các thiết bị tập bắn súng hiện nay thường ứng dụng công nghệ quang ảnh. Điều này cho phép theo dõi được quỹ đạo điểm ngắm (điểm đạn) trong quá trình tập bắn theo thời gian thực, cho phép giáo viên đánh giá được những mặt hạn chế của học viên từ đó có những hướng huấn luyện cụ thể nâng cao được kết quả bắn. Đây là một trong những ưu điểm của đề tài đưa ra hướng mới để từng bước nâng cao hiệu quả chế tạo thiết bị tập bắn.
1. Xây dựng bài toán
Giả sử sensor giám sát chuyển động được lắp trên súng tại vị trí gốc tọa độ như hình 2. Ở vị trí chuẩn sensor, súng ở vị trí (1) và điểm ngắm của súng tới tâm bia là (01). Lúc này hoàn toàn xác định được khoảng cách từ sensor đến bia. Tại thời điểm t, sensor, súng ở vị trí (2). Như hình vẽ, Sensor sẽ cung cấp các giá trị dịch chuyển tịnh tiến của súng theo các phương: x, y, z và các góc xoay: góc hướng α, góc tầm β và góc cuộn γ. Ở đây góc cuộn γ là góc tự xoay quanh nó chính là góc nghiêng của súng so với vị trí chuẩn. Bỏ qua γ, bài toán nêu ra ở đây là tính toán được độ dời xt, yt từ các giá trị đã biết nêu trên.
Do sensor luôn bố trí lệch so với đường ngắm và bỏ qua độ lệch trục sensor so với các trục của súng. Gọi R là đỉnh đầu ruồi, các giá trị khoảng cách lệch này là hoàn toàn đo được, các góc lệch và góc nghiêng sẽ được tính toán bù trừ khi tính sai số thiết bị.
αR = α; βR = β; γR = γ; Tọa độ của R: xR = x + xαβγ; yR = y + yαβγ; zR = z + zαβγ
2. Tính toán tọa độ đầu ruồi R:
Trong đó xR, yR , zR , αR, βR, γR là tọa độ dịch chuyển của R và các góc quay đường ngắm . Các giá trị xαβγ, yαβγ, , zαβγ hoàn toàn tính toán được. Ứng dụng nhóm công thức tính toán góc Euler và góc Tait-Bryan:
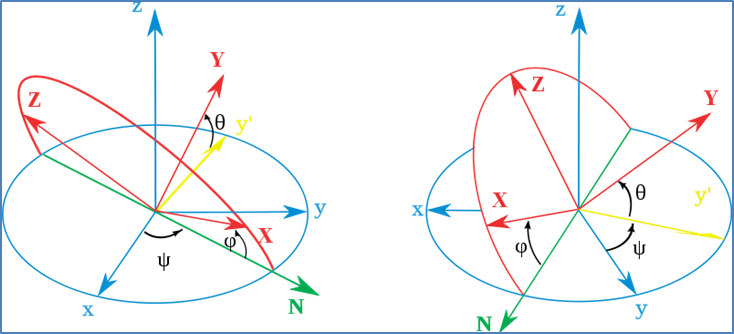
Hình 3: Góc Euler và góc Tait-Bryan
e/ Thời gian bắt đầu và thời gian kết thúc:
- Thời gian bắt đầu: 3/2013
- Thời gian kết thúc: 8/2014
g/ Kinh phí thực hiện: 474.700.000 đồng
(Có thể tìm đọc toàn văn Báo cáo kết quả nghiên cứu của nhiệm vụ tại Trung tâm Thông tin và Thống kê khoa học và công nghệ)